Un passo importante verso macchine più agili per applicazioni industriali e di consumo. Dactyl ne è un risultato eclatante. Un robot che ha imparato a risolvere il cubo di Rubik con una sola mano. Ma il vero successo per OpenAI, l’organizzazione di ricerca sull’intelligenza artificiale “padre” di Dactyl”, rivela un obiettivo molto ricercato per le più ampie industrie dell’intelligenza artificiale e della robotica.
Un robot che può imparare a svolgere una varietà di compiti nel mondo reale e senza la necessità di essere programmato in modo specifico.
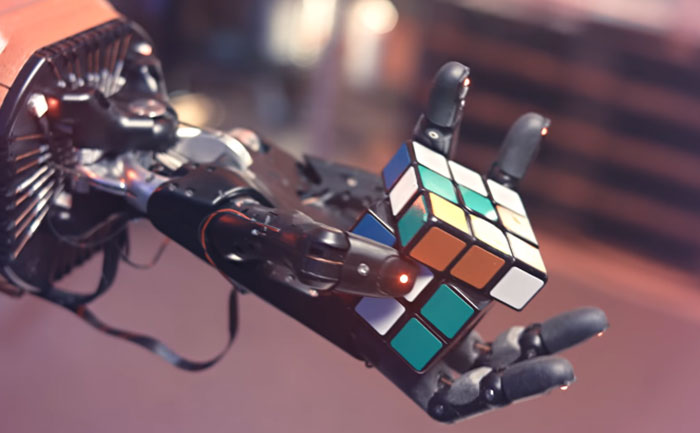
“Molti robot possono risolvere i cubi di Rubik velocemente. La differenza è che quei robot sono stati costruiti appositamente per operare su una singola azione ”, afferma Peter Welinder, ricercatore e capo della sezione robotica di OpenAI. “ Il nostro team ha ambizioni molto diverse. Stiamo cercando di costruire un robot per tutti gli usi. Con facoltà che hanno gli umani nel poter svolgere più cose con le loro mani. Non solo compiere uno specifico compito”.
In sostanza, un robot costruito per un compito specifico e programmato per eseguire quel compito nel modo più efficiente possibile, sarà sicuramente più funzionale di un essere umano. E la risoluzione del cubo di Rubik è qualcosa che da tempo numerosi software eseguono. Quindi sviluppare un robot per risolvere il cubo, anche umanoide, non è poi così straordinario in se, e tanto meno alla velocità con cui opera Dactyl, decisamente più lenta dei predecessori che hanno eseguito la stessa operazione… addirittura in meno di un secondo!
Dactyl è sviluppato da zero per essere una mano robotica che apprende e svolge nuovi compiti come farebbe un essere umano. Potrebbe ad esempio essere in grado di lavorare in un ambiente domestico complesso come una cucina.
Dactyl è una mano robotica a 24 articolazioni modellato sulla base di una mano umana. Non ha pinze robotiche o artigli come spesso si vede nelle fabbriche. E il software inserito dà a Dactyl l’apprendimento di come utilizzare tutte quelle articolazioni come farebbe un essere umano.
OpenAI afferma che Dactyl è un piccolo ma vitale passo verso qui tipi di robot che un giorno potrebbero svolgere lavori manuali o compiti domestici e persino lavorare a fianco degli umani, invece che in ambienti chiusi, senza alcuna programmazione esplicita che governa le loro azioni. L’intelligenza artificiale colpisce ancora…
TD SYNNEX Italy sceglie Spark 3 a Milano Santa Giulia come nuova sede di rappresentanza:…
Tre ricercatori del Cornell Tech hanno dimostrato che basta un commento di tredici parole su…
Europa 2031 immagina un continente rimasto indietro nell’intelligenza artificiale, dipendente da Stati Uniti e Cina…
La Cina investe 295 miliardi di dollari in cinque anni per una rete nazionale di…
Threats no longer tell large and small companies apart, only those who have the resources…
Silvia Olchini, Vice Presidente Secure Power di Schneider Electric Italia, racconta perché l’intelligenza artificiale comporta…
Via Italia 50, 20900 Monza (MB) - C.F. e Partita IVA: 03339380135
Reg. Trib. Milano n. 409 del 21/7/2011 - ROC n. 21424 del 3/8/2011
{kind=link}