Il primo drone con vere piume di uccello che vola imitando il volo dei piccioni e modifica la sua forma in volo

Un drone con delle vere ali di uccello che forse avrebbe fatto felice Leonardo da Vinci: i ricercatori della Stanford University hanno costruito un drone chiamato PigeonBot, con ali ricoperte di piume di piccione reali. Gli “arti” del robot, ricoperte da 40 piume di piccione ciascuna, sono state costruite collegando “polsi” e “dita” artificiali tramite legamenti elastici sintetici e lo rendono più agile e robusto nell’affrontare le turbolenze dell’aria rispetto ai droni rigidi.

Il drone fatto di vere piume
Per secoli, gli umani sono stati ossessionati dal volo. Gli ingegneri aerospaziali hanno capito da tempo che gli uccelli possono modellare la forma delle loro ali per adattarsi a vari schemi di volo, come il decollo, l’atterraggio e la virata, ma trasformare quel capolavoro dell’evoluzione in qualcosa di meccanico non è poi così facile.
Qualcuno però c’è riuscito: gli scienziati del laboratorio BIRD (Bio-Inspired Research & Design) dell’Università di Stanford. David Lentink, biologo e ingegnere aerospaziale, guida il progetto e afferma che riuscire a trasferire in un drone questa abilità quasi magica degli uccelli cambierà per sempre il design del volo, come siamo abituati a conoscerlo
Un esempio di biomimesi, ovvero di tecnologia che imita la natura. Fino ad oggi i droni si sono ispirati per lo più agli elicotteri, questo è il primo che prende a modello un uccello, da sempre re del volo.
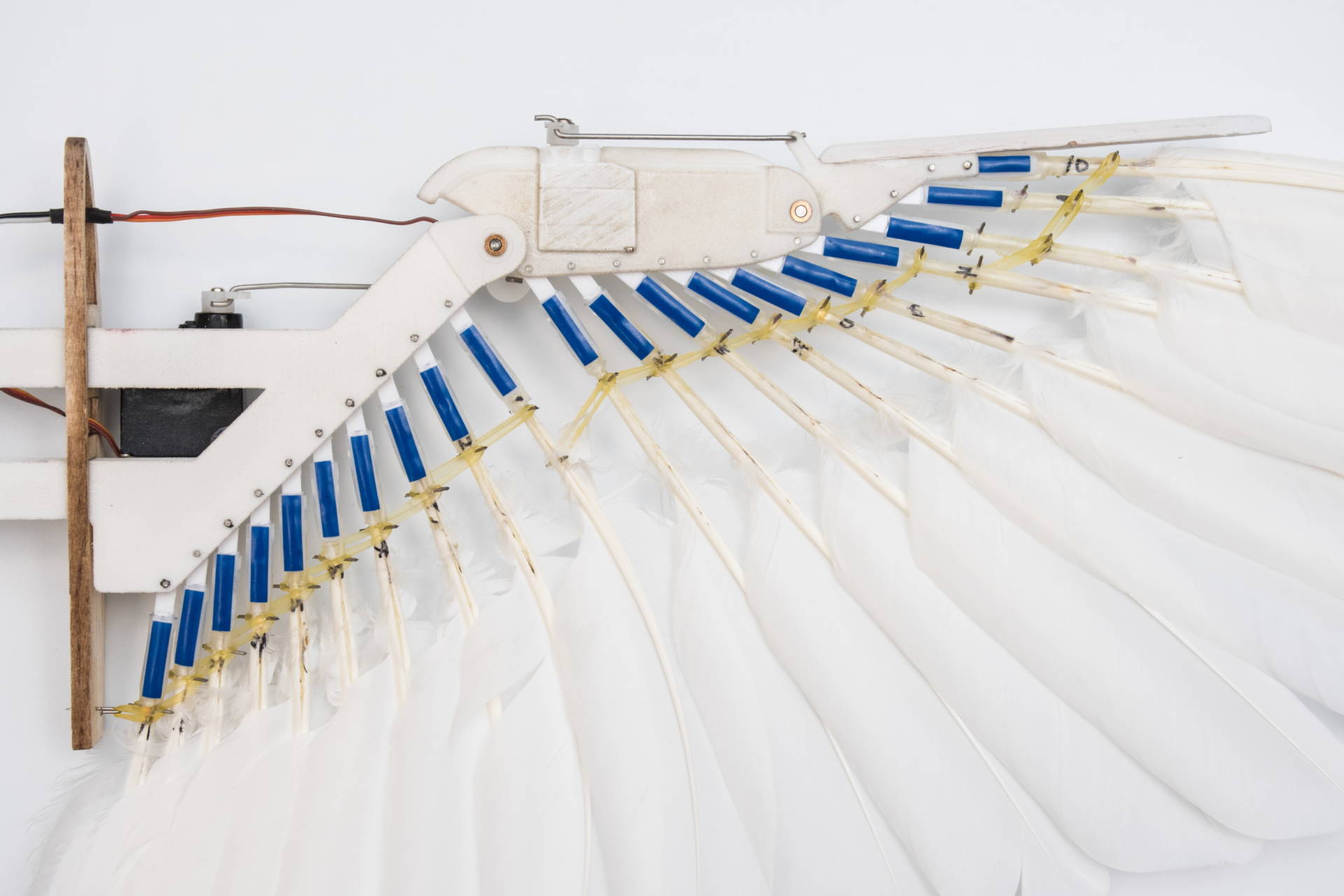
Attraverso lo studio dei loro scheletri, i ricercatori hanno scoperto che i piccioni controllano le loro 20 piume primarie e 20 secondarie tramite il movimento del polso e delle dita. Per replicare questo principio di controllo in un robot, hanno sviluppato un’ala bioibrida con le piume.
Come funziona il drone-piccione
Per capire come gli uccelli realizzano il morphing delle ali – ha spiegato il team su Science Robotics – abbiamo misurato la cinematica della flessione e dell’estensione delle ali nei colombi comuni, Columba livia. La cinematica dello scheletro e delle piume mostra che le 20 piume primarie e 20 secondarie sono coordinate tramite funzioni di trasferimento approssimativamente lineari controllate dal movimento del polso e delle dita. Per replicare questo principio di controllo in un robot, abbiamo sviluppato un’ala a morphing bioibrida con piume reali per comprendere i principi di progettazione sottostanti. Il risultato, PigeonBot, offre 42 gradi di libertà che controllano la posizione di 40 piume collegate elasticamente attraverso quattro articolazioni del polso e delle dita servoazionate. I nostri test di volo dimostrano che le morbide ali piumate si trasformano rapidamente e in modo stabile sotto carico aerodinamico. Non solo consentono il morphing dell’ala ma rendono anche più sicure le oprazioni di volo. Nei test di volo, abbiamo scoperto che sia il movimento asimmetrico del polso che quello delle dita possono dare inizio a manovre di virata, prove che gli uccelli possono usare le dita per virare in volo.
Al momento è un prototipo, ma si tratta di una nuova strada per la creazione di droni del futuro.
Lentink Lab/Stanford University
Francesco Marino
Giornalista esperto di tecnologia, da oltre 20 anni si occupa di innovazione, mondo digitale, hardware, software e social. È stato direttore editoriale della rivista scientifica Newton e ha lavorato per 11 anni al Gruppo Sole 24 Ore. È il fondatore e direttore responsabile di Digitalic

